• Goals:
1). Design, build and program a 6DOF arm that will eventually be mounted on a tank drive base (or similar) for humanitarian relief efforts, specifically search and rescue operations in environments where human access is restricted.
2). Create a lightweight drone with computer vision to communicate with the main robot.
• Tentative Schedule:
Spring & Summer 2024 - Complete mechanical components of the 6 degree of freedom robotic arm
Fall 2024 - Develop software for robotic arm using computer vision and perform mobility tests
Spring 2025 - Component waterproofing project (gaskets, sealants, membranes, etc...)
Summer 2025 - Create a lightweight custom drone. Test computer vision and communication with jetson
Fall 2025 - Drive base development
Spring 2026 - Robotic arm integration and testing
Summer & Fall 2026 - Full software development and testing
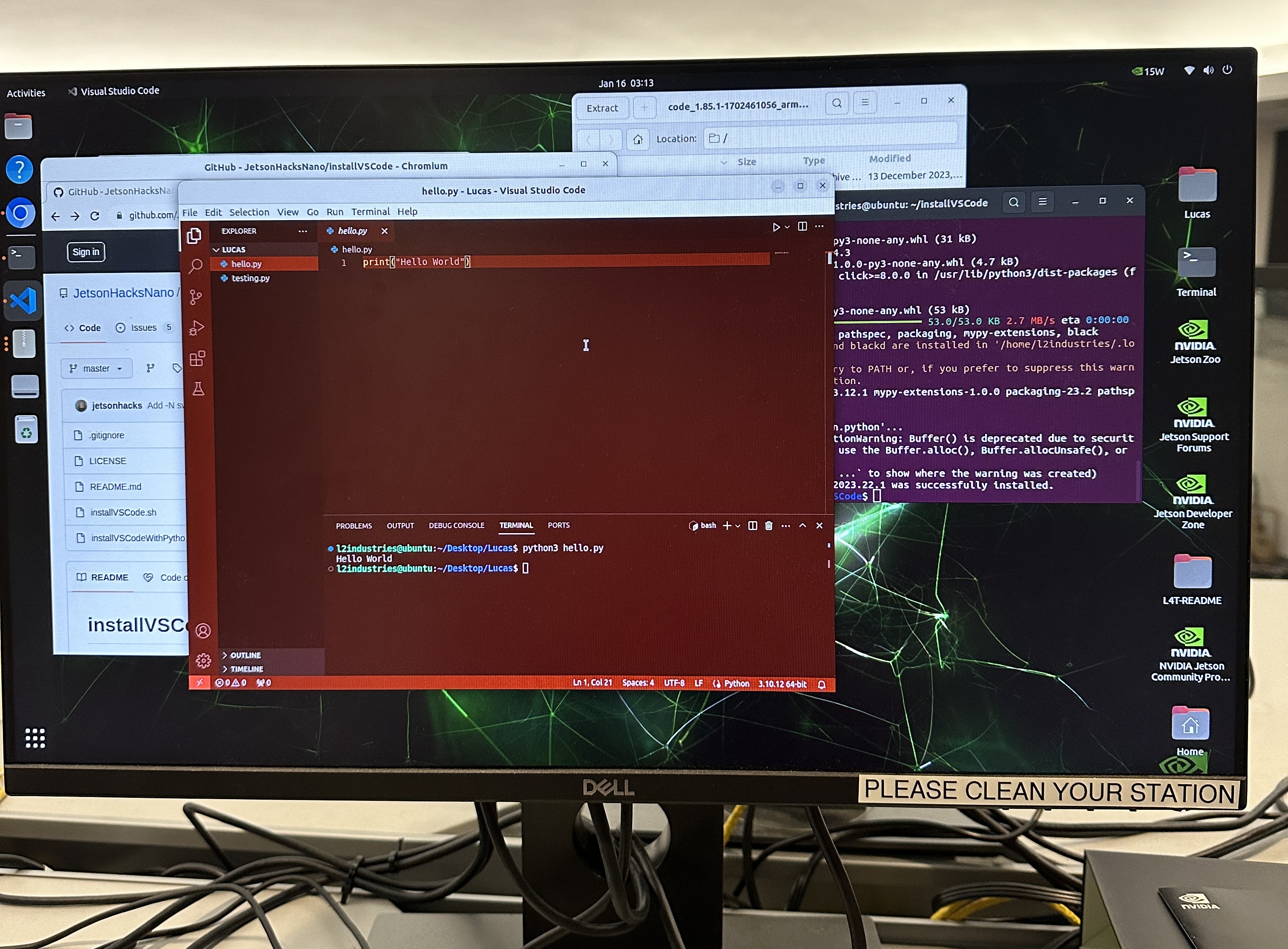
• Robotic Arm Plans: Nvidia Jetson Orin Nano connected to two Arduino Uno boards for stepper motor control + CV
• Drone Hardware Plans: TBD
• Drive Base Hardware Plans: TBD
Spring 2024 Updates:
#3
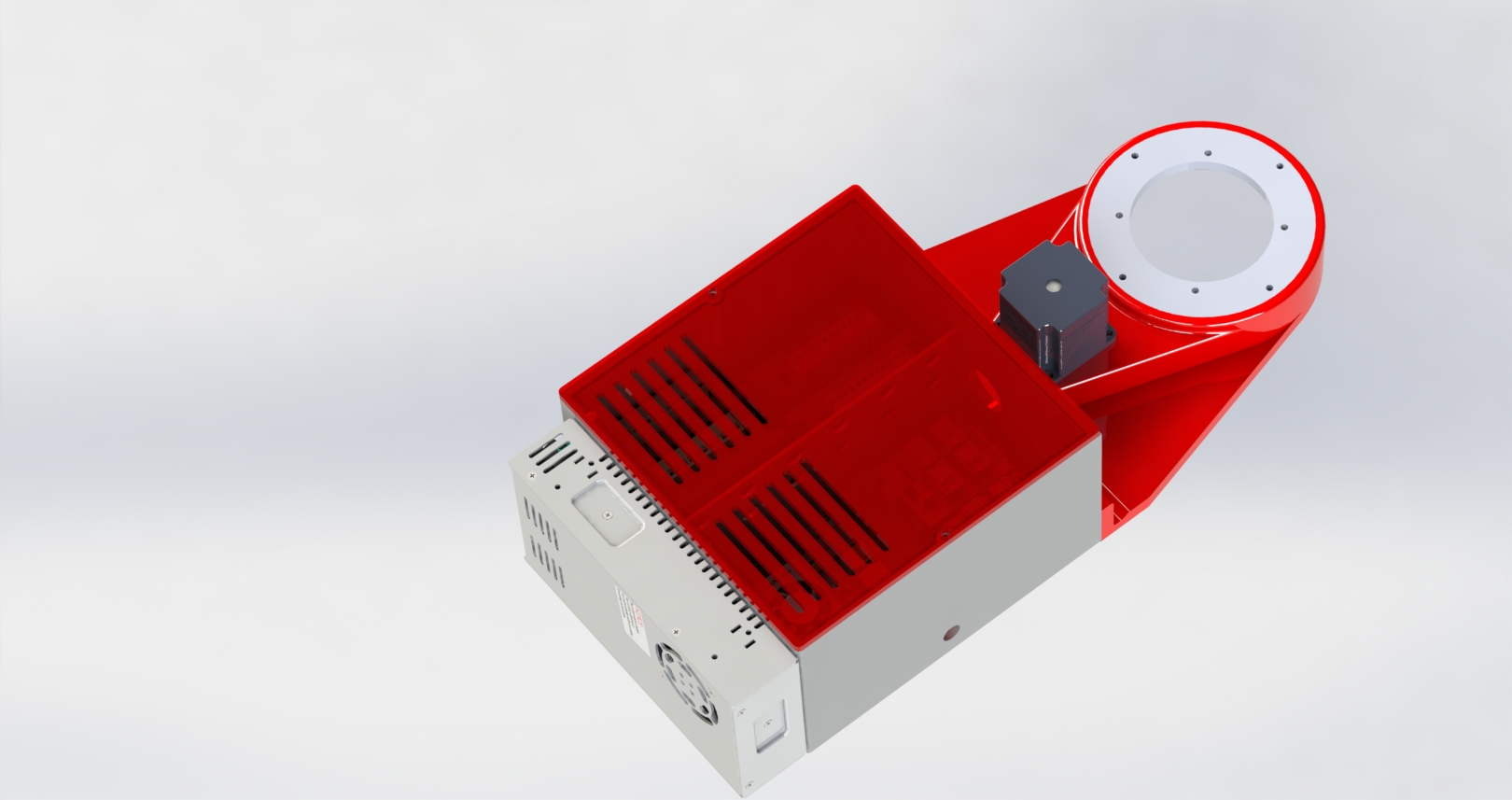
Design of turret base and electronics housing complete.
#2
Issues resolved. Board is up and running.
#1
Software:
• Orin Nano Startup Issues (L4T Launcher Recovery Boot Error)
Design:
• In progress using Solidworks